![]()
|
|
||
| CHAPTER 3. Navigation
Common Error: Mismanaging the Sequencing/ Nonsequencing Modes During a Hold Mismanagement of the sequencing and nonsequencing modes during a holding procedure is another common error. Failing to switch the FMS/GPS RNAV to the nonsequencing mode prior to reaching the holding waypoint, or prematurely switching the unit back to the sequencing mode once established in the hold, can prompt the FMS/GPS to sequence past the holding waypoint. In this case, you are left without guidance along the inbound holding course. Essential Skills
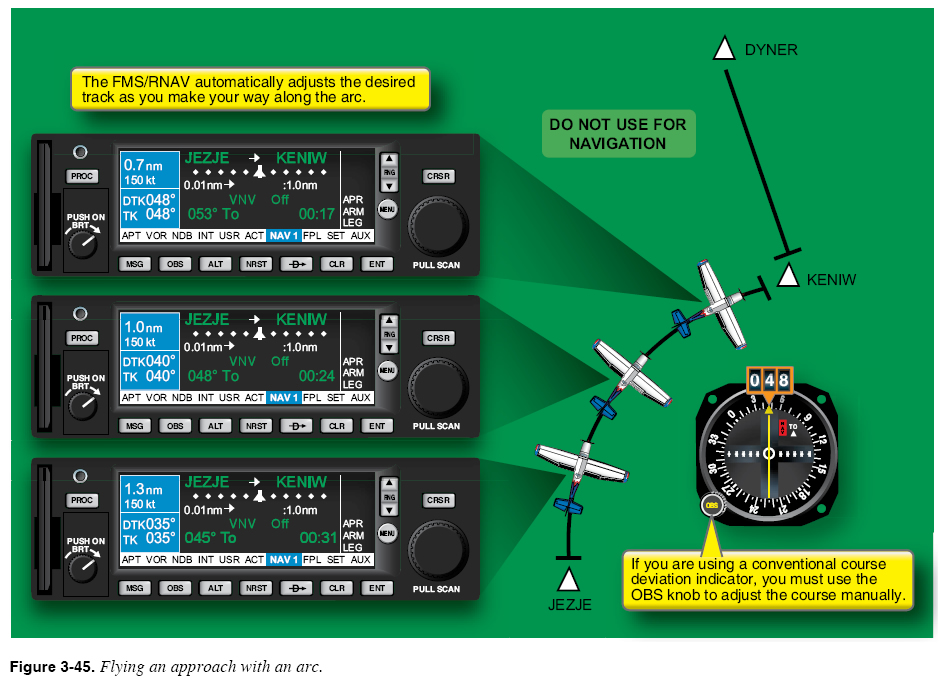
ARCS FMS and some GPS units simplify the problem of tracking arcs, which are curved courses between waypoints. The key feature of an arc is that there is no one bearing that takes you from one waypoint to the next. Rather, depending on its length, an arc requires you to follow a gradually changing heading toward the active waypoint. The example in Figure 3-45 illustrates how an FMS is used to fly a DME arc procedure.
on its length, an arc requires you to follow a gradually changing heading toward the active waypoint. The example in Figure 3-45 illustrates how an FMS is used to fly a DME arc procedure. Essential Skills
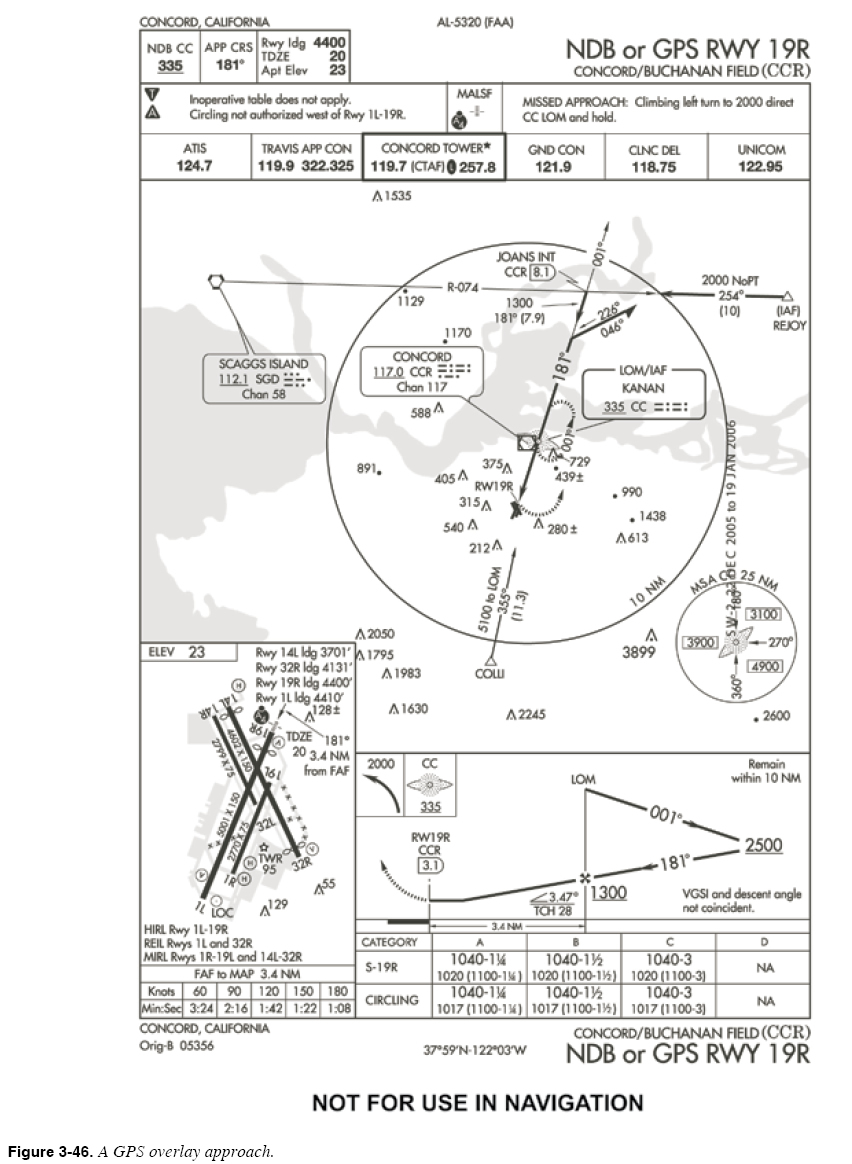
GPS and RNAV (GPS) Approaches An IFR-capable GPS RNAV/FMS with qualified GPS receiver(s) can be used as the sole means of navigation for several kinds of instrument approach procedures, but you need to know which approaches can be used with your particular GPS RNAV unit. The following paragraphs review the approaches available today. A GPS overlay approach is illustrated in Figure 3-46. The basic benefit of the GPS overlay approach is that it allows use of an IFR approved GPS receiver to navigate and fly a conventional nonprecision approach. From the previous text, you must know how to hold the specific sequences and how the unit can be stopped from sequencing through the flight plan. Many approaches require holding or a procedure turn to orient the aircraft correctly for the approach course. If you cannot control the sequencing of the FMS, you will lose course guidance upon the turn for outbound holding, as the FMS/GPS receiver sequences for the course beyond the holding fix.
GPS overlay approaches are named for the conventional system upon which the approach is based, but include the word GPS. The approach in Figure 3-46 is based on an existing NDB approach. If the aircraft has an IFR-approved FMS/GPS RNAV, you may use that guidance to fly the GPS overlay approach. It is not necessary for the aircraft to have the conventional navigational equipment on board for that approach, but conventional navigational avionics will be required for any required alternate, if equipped with a TSO- 129 GPS receiver. If conventional avionics are installed in the aircraft, there is no requirement to use the equipment in any way, although monitoring is always a good practice. If the installed FMS/GPS receiver is TSO-145A/146A WAAS certified, no other navigation equipment is required. One common pitfall of all advanced avionics approaches is the sometimes limited notification of the position along the approach path. In many instances, you must read the name of the waypoint to confirm where the aircraft is headed. It is easy for you to be preoccupied with cross-check and flying duties to miss a waypoint change and be of the mindset that you have one more waypoint to go before descent, or even worse, before a missed approach. Two main values always to include in the cross-check are:
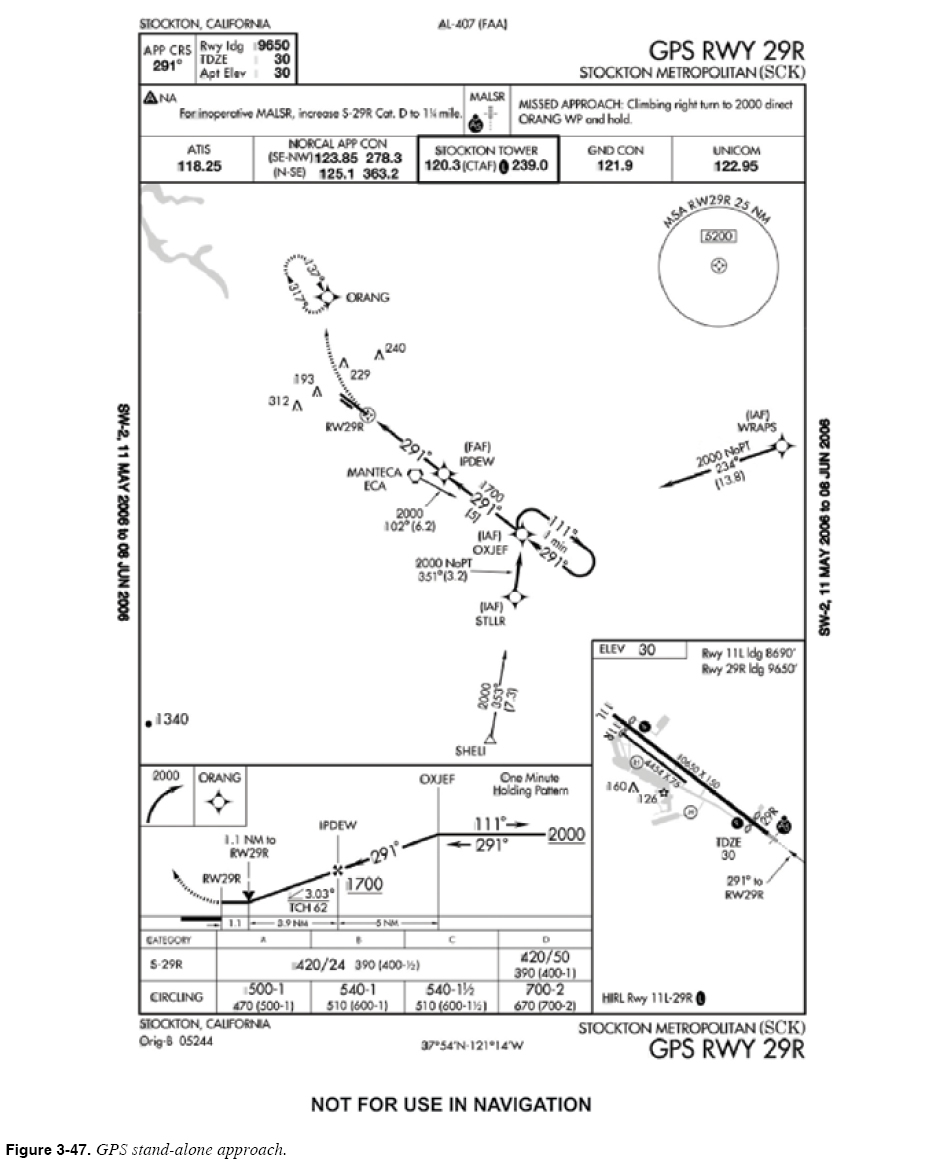
Not all units delay commanding a turn prior to reaching the specified turn altitude. You must know the required navigation courses and altitudes. The FMS/GPS unit may not be 100 percent correct, especially if an ADC is not installed. Since the FMS/GPS automatically switches to the approach sensitivity, you must not attempt to use the “approach” mode of the autopilot at that time, unless the autopilot documentation specifically directs the use of that mode at that time. Using that mode would make the autopilot hypersensitive and too responsive to navigation signals. GPS stand-alone approaches are nonprecision approaches based solely on the use of the GPS and an IFR-capable FMS with GPS navigation receiver or GPS RNAV. A GPS standalone approach is shown in Figure 3-47.
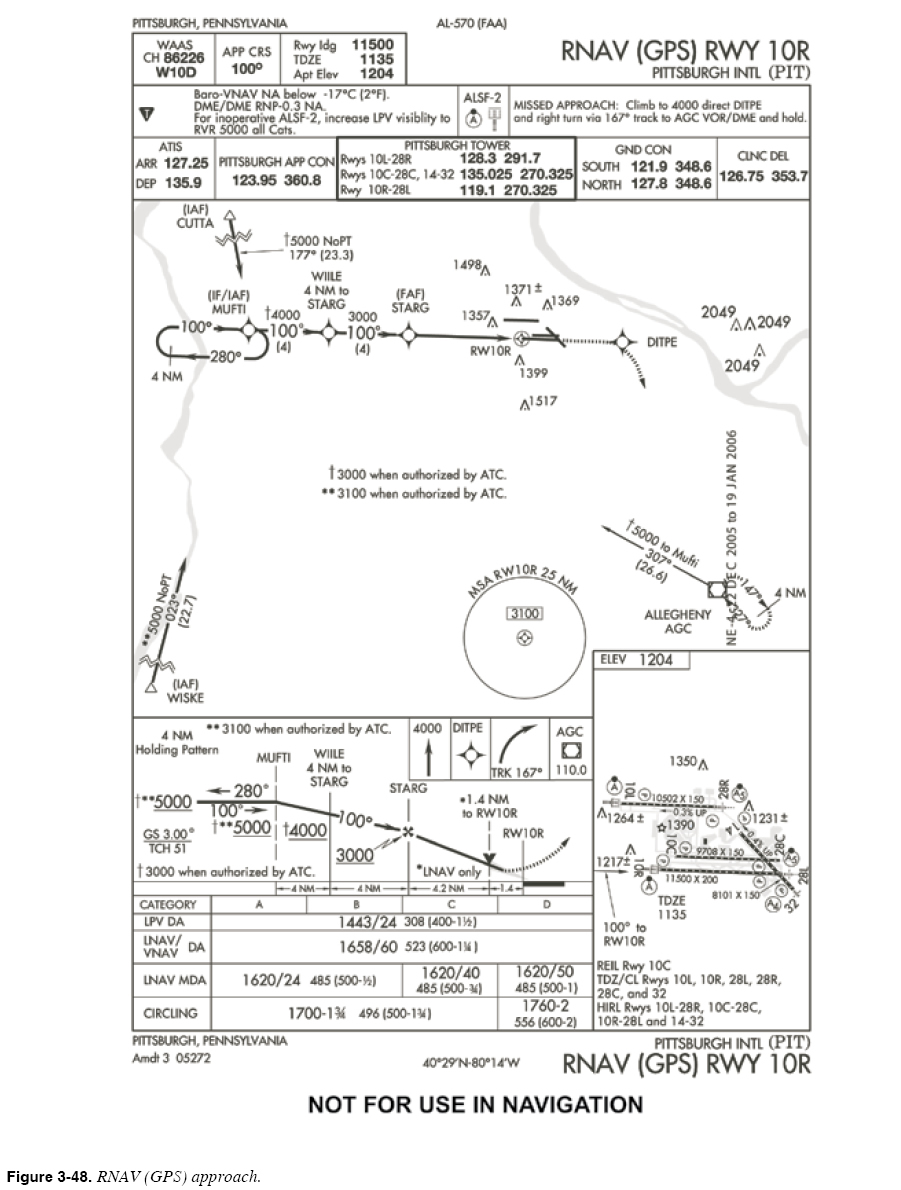
RNAV (GPS) approaches are designed to accommodate aircraft equipped with a wide variety of GPS receivers. An RNAV (GPS) approach procedure is shown in Figure 3-48. A GPS approach typically offers different approach minimums (and sometimes different missed approach points) depending on the type of GPS receiver, aircraft, and installation being used to complete the approach.
|
| ©AvStop Online Magazine Contact Us Return To Books |