![]()
|
|
||
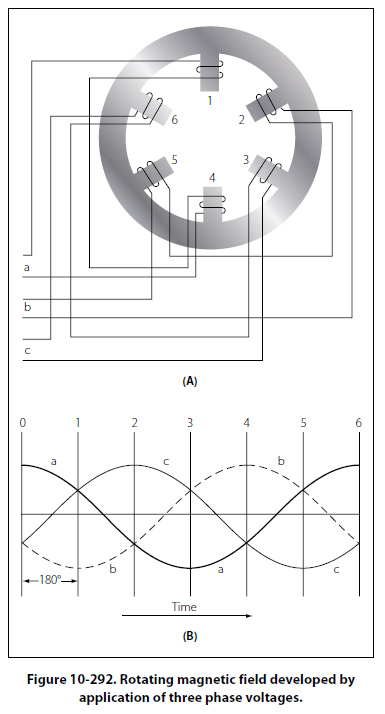
AC Motors Because of their advantages, many types of aircraft motors are designed to operate on alternating current. In general, AC motors are less expensive than comparable DC motors. In many instances, AC motors do not use brushes and commutators so sparking at the brushes is avoided. AC motors are reliable and require little maintenance. They are also well suited for constant speed applications and certain types are manufactured that have, within limits, variable speed characteristics. Alternating current motors are designed to operate on polyphase or single phase lines and at several voltage ratings. The speed of rotation of an AC motor depends upon the number of poles and the frequency of the electrical source of power: rpm =120 × Frequency/Number of poles Since airplane electrical systems typically operate at 400 cycles, an electric motor at this frequency operates at about seven times the speed of a 60 cycle commercial motor with the same number of poles. Because of this high speed of rotation, 400-cycle AC motors are suitable for operating small high-speed rotors, through reduction gears, in lifting and moving heavy loads, such as the wing flaps, the retractable landing gear, and the starting of engines. The 400-cycle induction type motor operates at speeds ranging from 6,000 rpm to 24,000 rpm. Alternating current motors are rated in horsepower output, operating voltage, full load current, speed, number of phases, and frequency. Whether the motors operate continuously or intermittently (for short intervals) is also considered in the rating. Types of AC Motors There are two general types of AC motors used in aircraft systems: induction motors and synchronous motors. Either type may be single phase, two phase, or three phase. Three phase induction motors are used where large amounts of power are required. They operate such devices as starters, flaps, landing gears, and hydraulic pumps. Single phase induction motors are used to operate devices such as surface locks, intercooler shutters, and oil shutoff valves in which the power requirement is low. Three phase synchronous motors operate at constant synchronous speeds and are commonly used to operate flux gate compasses and propeller synchronizer systems. Single phase synchronous motors are common sources of power to operate electric clocks and other small precision equipment. They require some auxiliary method to bring them up to synchronous speeds; that is, to start them. Usually the starting winding consists of an auxiliary stator winding. Three Phase Induction Motor The three phase AC induction motor is also called a squirrel cage motor. Both single phase and three phase motors operate on the principle of a rotating magnetic field. A horseshoe magnet held over a compass needle is a simple illustration of the principle of the rotating field. The needle will take a position parallel to the magnetic flux passing between the two poles of the magnet. If the magnet is rotated, the compass needle will follow. A rotating magnetic field can be produced by a two or three phase current flowing through two or more groups of coils wound on inwardly projecting poles of an iron frame. The coils on each group of poles are wound alternately in opposite directions to produce opposite polarity, and each group is connected to a separate phase of voltage. The operating principle depends on a revolving, or rotating, magnetic field to produce torque. The key to understanding the induction motor is a thorough understanding of the rotating magnetic field. Rotating Magnetic Field The field structure shown in Figure 10-292A has poles whose windings are energized by three AC voltages, a, b, and c. These voltages have equal magnitude but differ in phase, as shown in Figure 10-292B: at the instant of time shown as 0, the resultant magnetic field produced by the application of the three voltages has its greatest intensity in a direction extending from pole 1 to pole 4.
Under this condition, pole 1 can be considered as a north pole and pole 4 as a south pole. At the instant of time shown as 1, the resultant magnetic field will have its greatest intensity in the direction extending from pole 2 to pole 5; in this case, pole 2 can be considered as a north pole and pole 5 as a south pole. Thus, between instant 0 and instant 1, the magnetic field has rotated clockwise. At instant 2, the resultant magnetic field has its greatest intensity in the direction from pole 3 to pole 6, and the resultant magnetic field has continued to rotate clockwise. At instant 3, poles 4 and 1 can be considered as north and south poles, respectively, and the field has rotated still farther. At later instants of time, the resultant magnetic field rotates to other positions while traveling in a clockwise direction, a single revolution of the field occurring in one cycle. If the exciting voltages have a frequency of 60 cps, the magnetic field makes 60 revolutions per second, or 3,600 rpm. This speed is known as the synchronous speed of the rotating field. |
| ©AvStop Online Magazine Contact Us Return To Books |