![]()
|
|
||
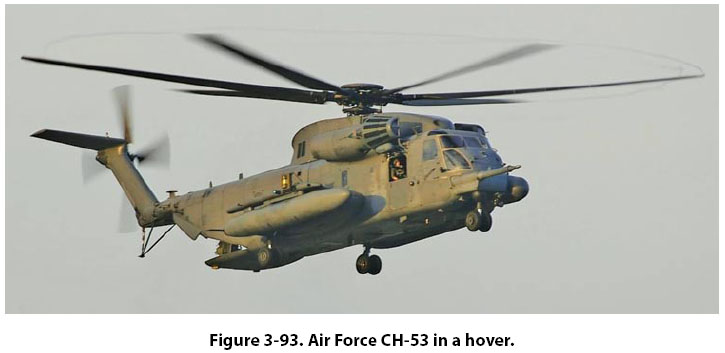
Helicopters in Flight Hovering For a helicopter, hovering means that it is in flight at a constant altitude, with no forward, aft, or sideways movement. In order to hover, a helicopter must be producing enough lift in its main rotor blades to equal the weight of the aircraft. The engine of the helicopter must be producing enough power to drive the main rotor, and also to drive whatever type of anti-torque system is being used. The ability of a helicopter to hover is affected by many things, including whether or not it is in ground effect, the density altitude of the air, the available power from the engine, and how heavily loaded it is. For a helicopter to experience ground effect, it typically needs to be no higher off the ground than one half of its main rotor system diameter. If a helicopter has a main rotor diameter of 40 ft, it will be in ground effect up to an altitude of approximately 20 ft. Being close to the ground affects the velocity of the air through the rotor blades, causing the effective angle of attack of the blades to increase and the lift to increase. So, if a helicopter is in ground effect, it can hover at a higher gross weight than it can when out of ground effect. On a windy day, the positive influence of ground effect is lessened, and at a forward speed of 5 to 10 mph the positive influence becomes less. In Figure 3-93, an Air Force CH-53 is seen in a hover, with all the rotor blades flapping up as a result of creating equal lift.
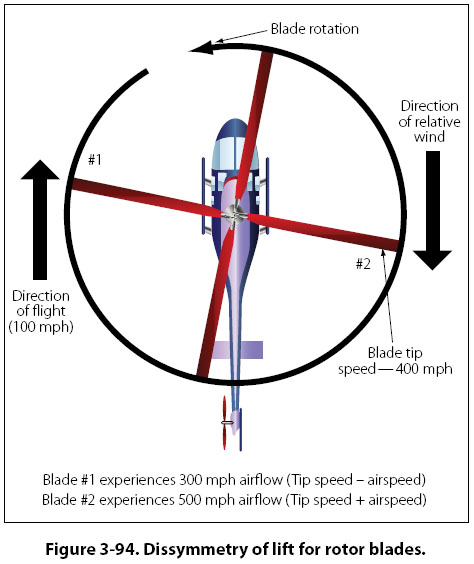
Forward Flight In the early days of helicopter development, the ability to hover was mastered before there was success in attaining forward flight. The early attempts at forward flight resulted in the helicopter rolling over when it tried to depart from the hover and move in any direction. The cause of the rollover is what we now refer to as dissymmetry of lift. When a helicopter is in a hover, all the rotor blades are experiencing the same velocity of airflow. When the helicopter starts to move, the velocity of airflow seen by the rotor blades changes. For helicopters built in the United States, the main rotor blades turn in a counterclockwise direction when viewed from the top. Viewed from the top, as the blades move around the right side of the helicopter, they are moving toward the nose; as they move around the left side of the helicopter, they are moving toward the tail. When the helicopter starts moving forward, the blade on the right side is moving toward the relative wind, and the blade on the left side is moving away from the relative wind. This causes the blade on the right side to create more lift and the blade on the left side to create less lift. Figure 3-94 shows how this occurs. In Figure 3-94, blade number 2 would be called the advancing blade, and blade number 1 would be called the retreating blade. The advancing blade is moving toward the relative wind, and therefore experiences a greater velocity of airflow. The increased lift created by the blade on the right side will try to roll the helicopter to the left. If this condition is allowed to exist, it will ultimately lead to the helicopter crashing.
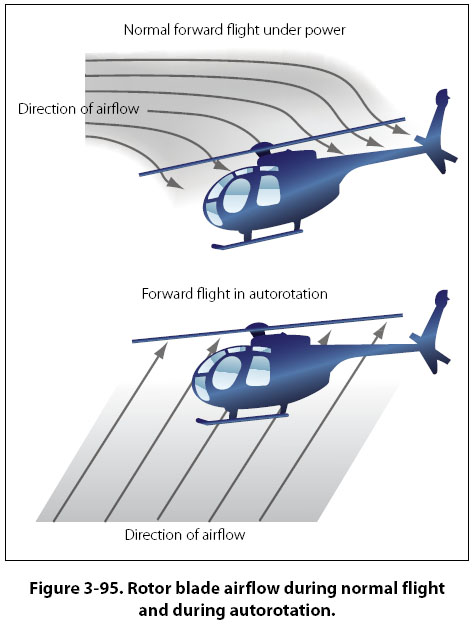
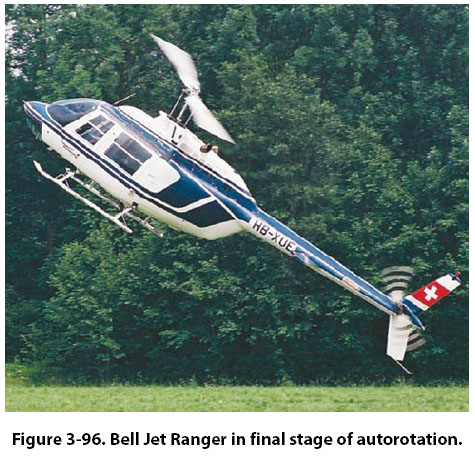
Blade Flapping To solve the problem of dissymmetry of lift, helicopter designers came up with a hinged design that allows the rotor blade to flap up when it experiences increased lift, and to flap down when it experiences decreased lift. When a rotor blade advances toward the front of the helicopter and experiences an increased velocity of airflow, the increase in lift causes the blade to flap up. This upward motion of the blade changes the direction of the relative wind in relation to the chord line of the blade, and causes the angle of attack to decrease. The decrease in the angle of attack decreases the lift on the blade. The retreating blade experiences a reduced velocity of airflow and reduced lift, and flaps down. By flapping down, the retreating blade ends up with an increased angle of attack and an increase in lift. The end result is the lift on the blades is equalized, and the tendency for the helicopter to roll never materializes. The semi-rigid and fully articulated rotor systems have flapping hinges that automatically allow the blades to move up or down with changes in lift. The rigid type of rotor system has blades that are flexible enough to bend up or down with changes in lift. Advancing Blade and Retreating Blade Problems As a helicopter flies forward at higher and higher speeds, the blade advancing toward the relative wind sees the airflow at an ever increasing velocity. Eventually, the velocity of the air over the rotor blade will reach sonic velocity, much like the critical Mach number for the wing of an airplane. When this happens, a shock wave will form and the air will separate from the rotor blade, resulting in a high-speed stall. As the helicopter’s forward speed increases, the relative wind over the retreating blade decreases, resulting in a loss of lift. The loss of lift causes the blade to flap down and the effective angle of attack to increase. At a high enough forward speed, the angle of attack will increase to a point that the rotor blade stalls. The tip of the blade stalls first, and then progresses in toward the blade root. When approximately 25 percent of the rotor system is stalled, due to the problems with the advancing and retreating blades, control of the helicopter will be lost. Conditions that will lead to the rotor blades stalling include high forward speed, heavy gross weight, turbulent air, high-density altitude, and steep or abrupt turns. Autorotation The engine on a helicopter drives the main rotor system by way of a clutch and a transmission. The clutch allows the engine to be running and the rotor system not to be turning, while the helicopter is on the ground, and it also allows the rotor system to disconnect from the engine while in flight, if the engine fails. Having the rotor system disconnect from the engine in the event of an engine failure is necessary if the helicopter is to be capable of a flight condition called autorotation. Autorotation is a flight condition where the main rotor blades are driven by the force of the relative wind passing through the blades, rather than by the engine. This flight condition is similar to an airplane gliding if its engine fails while in flight. As long as the helicopter maintains forward airspeed, while decreasing altitude, and the pilot lowers the blade angle on the blades with the collective pitch, the rotor blades will continue to rotate. The altitude of the helicopter, which equals potential energy, is given up in order to have enough energy (kinetic energy) to keep the rotor blades turning. As the helicopter nears the ground, the cyclic pitch control is used to slow the forward speed and to flare the helicopter for landing. With the airspeed bled off, and the helicopter now close to the ground, the final step is to use the collective pitch control to cushion the landing. The airflow through the rotor blades in normal forward flight and in an autorotation flight condition are shown in Figure 3-95. In Figure 3-96, a Bell Jet Ranger is shown approaching the ground in the final stage of an autorotation.
|
| ©AvStop Online Magazine Contact Us Return To Books |