The most critical time for an engine out condition in a twin engine airplane is during the two or three second period immediately following the takeoff roll while the airplane is accelerating to a safe engine failure speed.
Although most twin engine airplanes are controllable at a speed close to the engine out minimum control speed, the performance is often so far below optimum that continued flight following takeoff may be marginal or impossible. A more suitable recommended speed, termed by some aircraft manufacturers as minimum safe single engine speed, is that at which altitude can be maintained while the landing gear is being retracted and the propeller is being feathered.
Upon engine failure after reaching the safe single engine speed on takeoff, the twin engine pilot (having lost one-half of the normal power) usually has a significant advantage over the pilot of a single engine airplane, because, if the particular airplane has single engine climb capability at the existing gross weight and density altitude, there may be the choice of stopping or continuing the takeoff. This compares with the other only choice facing a single engine airplane pilot who suddenly has lost half of the normal takeoff power - that is, stop!
If one engine fails prior to reaching Vmc, there is no choice but to close both throttles and bring the airplane to a stop. If engine failure occurs after becoming airborne, the pilot must decide immediately to land or to continue the takeoff.
If the decision is made to continue the takeoff, the airplane must be able to gain altitude with one engine inoperative. This requires acceleration to Vyse if no obstacles are involved, or to Vxse if obstacles are a factor.
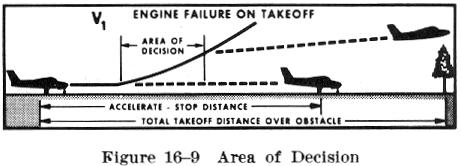
To make a correct decision in an emergency of this type, the pilot must consider the runway length, field elevation, density altitude, obstruction height, headwind component, and the airplane's gross weight. (For simplification purposes, additional factors such as runway contaminants [rubber, soot, water, ice, snow] and runway slope will not be discussed here.) The flightpaths illustrated in Fig. 16-9 indicate that the "area of decision" is bounded by: (1) the point at which Vy is reached and (2) the point where the obstruction altitude is reached. An engine failure in this area demands an immediate decision. Beyond this decision area, the airplane, within the limitations of engine out climb performance, can usually be maneuvered to a landing at the departure airport.
The "accelerate/stop distance" is the total distance required to accelerate the twin engine airplane to a specified speed and, assuming failure of an engine at the instant that speed is attained, to bring the airplane to a stop on the remaining runway. The "accelerate/go distance" is the total distance required to accelerate the airplane to a specified speed and, assuming failure of an engine at the instant that speed is attained, continue takeoff on the remaining engine to a height of 50 feet.
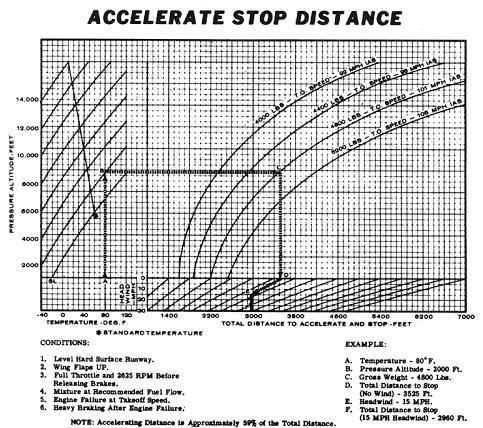
For example, use the chart in Fig. 16-10 and assume that with a temperature of 80 degrees F., a calm wind at a pressure altitude of 2,000 feet, a gross weight of 4,800 pounds, and all engines operating, the airplane being flown requires 3,525 feet to accelerate to 105 MPH and then be brought to a stop. Assume also that the airplane under the same conditions requires a distance of 3,830 feet to take off and climb over a 50 foot obstacle (Fig. 16-11) when one engine fails at 105 MPH.

With such a slight margin of safety (305 feet) it would be better to discontinue the takeoff and stop if the runway is of adequate length, since any slight mismanagement of the engine out procedure would more than outweigh the small advantage offered by continuing the takeoff. At higher field elevations the advantage becomes less and less until at very high density altitudes a successful continuation of the takeoff is extremely improbable.