Dead Reckoning
Dead Reckoning
| Dead reckoning, as applied to flying, is the navigation
of an airplane solely by means of computations based on airspeed, course,
heading, wind direction and speed, groundspeed, and elapsed time. Dead
reckoning which, to oversimplify, is a system of "determining where the
airplane should be on the basis of where it has been." In other words,
it is literally deduced reckoning, which is where the term came from, i.e.,
ded. or "dead" reckoning. The most common form of VFR navigation is a combination
of dead reckoning and pilotage, during which the course flown and the airplane's
position are calculated by true dead reckoning and then constantly corrected
for error and variables after visually checking nearby landmarks.
The simplest kind of dead reckoning assumes that the air
is calm. If the wind were to remain calm, the airplane's track (path) over
the ground would be the same as the intended course and the groundspeed
would be the same as the airplane's true airspeed.
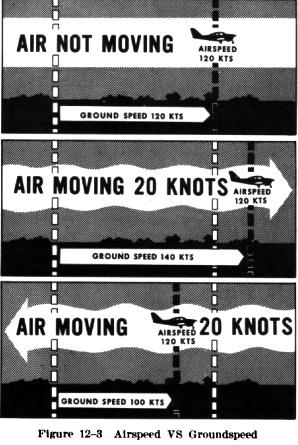
As shown in Fig. 12-3, an airplane flying eastward at an airspeed of
120 knots in still air, will have a groundspeed exactly the same - 120
knots. If the mass of air is moving eastward at 20 knots, the speed of
the airplane (airspeed) through the air will not be affected, but the progress
of the airplane as measured over the ground will be 120 plus 20, or a groundspeed
of 140 knots. On the other hand, if the mass of air is moving westward
at 20 knots, the airspeed of the airplane still remains the same but the
groundspeed becomes 120 minus 20 or 100 knots. |
|
In preparation for the combination of elementary dead reckoning
and pilotage on a cross-country flight, the proposed course line to be
followed is drawn on the chart and measured with a protractor to determine
the number of degrees it lies from true north. This is called "true course"
(TC). To the number of degrees thus measured, the pilot must add or subtract
the "magnetic variation" (shown on the chart by a red, dashed, isogonic
line). The variation shown is the angular difference between true north
and magnetic north in that particular locality. As we know the true North
Pole and the magnetic North Pole are not located at the same place. Since
the magnetic compass points to the magnetic North Pole, it indicates a
magnetic direction. The course line on the chart is measured in relation
to true North; therefore, the "True Course" must be converted to the "Magnetic
Course." When converting from a "true" to a "magnetic" course, the pilot
adds westerly variation, or subtracts easterly variation. The resultant
figure should be written down beside the course line and is termed the
"Magnetic Course" (MC).
In actual flight, winds may cause considerable deviation
from the desired ground track unless some sort of correction is made. An
airplane flying within a moving mass of air will move with the air in the
same direction and speed that the air is moving over the ground. Consequently,
at the end of a given time period, the airplane will be in a position which
resulted from a combination of the two motions: the movement of the air
mass in reference to the ground, and the forward movement of the airplane
through the air mass.
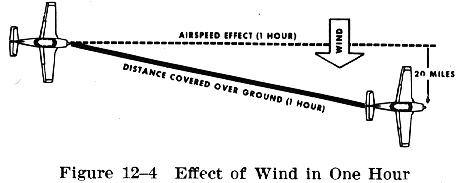
As shown in Fig. 12-4, if the airplane is flying eastward
at an airspeed of 120 knots, and the air mass is moving southward at 20
knots, the airplane at the end of 1 hour will be at a point that is approximately
120 miles eastward of its point of departure (due to its progress through
the air) and 20 miles southward (due to the motion of the air). Under these
circumstances the airspeed remains 120 knots, but the groundspeed is determined
by combining the movement of the airplane with the movement of the air
mass. Groundspeed can be measured as the distance traveled in 1 hour from
the point of departure. The groundspeed can be computed in flight by noting
the time required to fly between two points a known distance apart (two
checkpoints on the course). It also can be calculated before flight by
plotting the airplane's heading and airspeed along with a wind vector.
This is done most frequently by means of an air navigation computer - a
circular type slide rule.
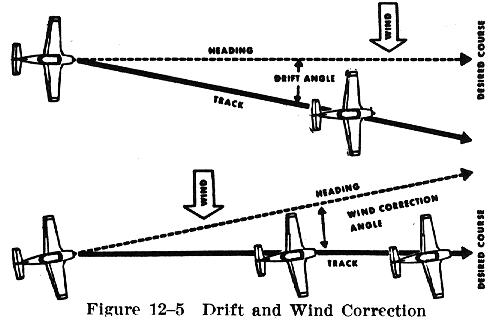
The direction in which the airplane is pointing as it flies
is its heading (Fig. 12-5). Its actual path over the ground, a combination
of the motion of the airplane and the motion of the air, is the ground
track. The angle between the heading and the track is termed drift angle.
As demonstrated in Fig. 12-5, if the airplane is headed along the course
line with the wind blowing from the left, the track will not coincide with
the desired course. The wind will drift the airplane to the right, so the
track will lie to the right of the desired course.
By anticipating the amount of drift, the pilot can counteract
the effect of the wind, thereby making the ground track of the airplane
coincide with the desired course. If the mass of air is moving across the
course from the right, the airplane will drift to the left, and a correction
must be made by heading the airplane sufficiently to the right to offset
this drift. If the wind is from the left the correction must be made by
turning the airplane to the left - into the wind (Fig. 12-5).
Familiarity with a magnetic compass is essential, not only
so that it can be read easily and accurately, but in order that the pilot
may have complete confidence in the instrument. Despite tales of compass
failure, actual instances of such are rare. Compasses may spin temporarily,
or read inaccurately over areas where there is a natural magnetic disturbance,
but its inherent idiosyncrasies are not to be seized upon as the cause
of poor navigation.
Trusting the compass implies a knowledge of how it functions.
The magnetic compass does not point to true north, but is controlled by
the lines of force in the earth's magnetic field. These lines are not parallel
to the meridians (lines which meet at the true North and South poles of
the earth); they diverge from the meridians at different angles in different
locations on the earth's surface. The amount of this difference, or "variation,"
is indicated on all aeronautical charts for the benefit of pilots.
The compass is affected also by the attraction of metal,
such as the engine, wiring, radio, and steel structure of the airplane.
Compensation is made for this through a ground procedure referred to as
"swinging the compass" and the deviation from various magnetic directions
is noted on a compass card installed in the cockpit. Thus, in computing
a compass course, both variation and deviation must be allowed for on all
headings.
Keeping an airplane flying on a desired heading using only
a magnetic compass can be frustrating to a pilot who is not familiar with
the compass's characteristics and errors. This lack of understanding can
result in the pilot thinking that the compass has malfunctioned and headings
are unreliable.
No attempt should be made to read the compass until the
airplane has been held straight and level for at least 30 seconds because
the compass is deflected during any inclination or banking. This is the
result of the Magnetic North Pole (toward which the needle attempts to
point) being actually below the horizon, due to the curvature of the earth.
This is called magnetic dip.
In level flight it is easier to fly the average compass
indication than to try to hold an exact heading. To steer a course after
the airplane has been established accurately on the desired course, one
should look directly ahead to select some object to head toward, and then
note the compass indication to determine whether the proper heading is
being maintained. If it is not, a slight change should be made relative
to the object.
It will be found that a knowledge of the principles of
dead reckoning is very important not only in planning the course and determining
the elapsed time required for the flight, but in assisting the pilot in
determining the airplane's position after having become disoriented or
confused as to the airplane's position. By using information gained on
the part of the flight already completed, the pilot who is thoroughly familiar
with these principles can determine the airplane's approximate present
position. In this way, it is possible to restrict the search for identifiable
landmarks to a limited area to verify calculations and to relocate one's
self.