![]()
|
|
||
| CHAPTER 9—Float and Ski Equipped Helicopters
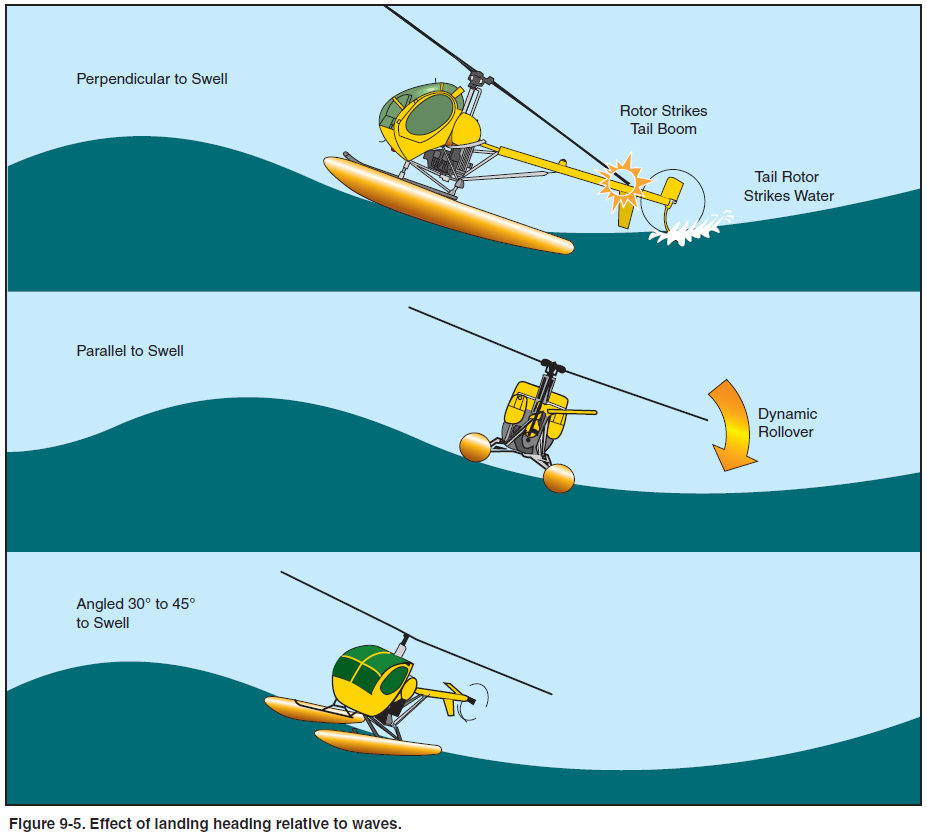
TAKEOFF A float equipped helicopter can perform a normal takeoff from a hover or directly from the water. If there is insufficient power available for a normal takeoff, a running takeoff from a slow forward taxi may be an option. However, remember that water creates drag, so with insufficient power, a running takeoff may not be possible either. The preferred method for taking off from water is to move forward into translational lift without pausing to hover after leaving the water. This type of takeoff is similar to a normal takeoff from the surface. A normal takeoff from a hover over water is similar to the same type of takeoff over a hard surface. A common problem is poor judgment of altitude and rate of acceleration, which causes the pilot to increase speed without an increase in altitude. This causes the helicopter to enter the high speed portion of the height/velocity diagram, reducing the probability of a successful autorotation in the event of an engine failure. Also, be aware of possible restricted visibility during takeoff from water spray produced by the rotors. To help alleviate these problem areas, as the helicopter begins to move forward, use reference points some distance in front of the helicopter. Over water, ground effect is reduced from the absorption of energy in the downwash. This increases the power required to hover and with other factors may exceed the power available. When this occurs, perform a slow taxi to a takeoff to take advantage of the translational lift produced from the forward motion. Remember, translational lift is also affected by any wind that is present. Apply sufficient collective pitch to keep the floats riding high or skimming the surface. While skimming the surface, float drag increases rapidly, and the takeoff must be executed promptly since a further increase in speed, with the floats plowing in the water, is likely to exceed the limit of aft cyclic control or cause the floats to tuck under the water. The speed at which the floats tuck under is the maximum forward speed that can be attained and is determined by the load and attitude of the helicopter. Never lower the collective during this procedure because doing so could bury the nose of the floats in the water and possibly capsize the helicopter. LANDING Pilots performing glassy water landings may experience some difficulty in determining their altitude above the surface. The recommended procedure is to continue an approach to the surface with a slow rate of descent until making contact, avoiding any attempt to hover. The helicopter’s downwash creates a disturbance in the water as concentric ripples moving away from the helicopter. Although this provides the pilot with a visual reference, it may also cause the sensation of moving backwards or descending rapidly. A natural tendency is to apply too much collective pitch in an attempt to halt the perceived descent. To overcome the effects of these visual illusions, avoid staring at the water near the helicopter and maintain forward and downward movement until contacting the water. When making approaches to a landing on a large body of water when land areas or other fixed objects are not visible, occasionally glance to either side of the horizon to avoid stare-fixation. Another technique some pilots use when fixed objects are not available, and the water is glassy, is to make a low pass over the area to create a disturbance on the surface. This disturbance remains for a while giving the pilot a reference to help determine distance. When landing on water with a slight chop, bring the helicopter to a hover and descend vertically with no horizontal movement. This procedure is similar to landing on a hard surface. Make a running landing on water when high density altitude or a heavy load results in insufficient power to hover. Perform this type of landing when sufficient power is not available to reduce the speed to 5 knots or less. When approaching with greater than 5 knots of speed, hold a slight nose-high attitude to allow the aft portion of the floats to plane. Maintain collective pitch until the speed reduces to below 5 knots, and the helicopter settles into the water. At zero groundspeed, slowly lower the collective into the full down position. Lowering the collective or leveling the helicopter too quickly may result in the floats tucking, which can cause the helicopter to capsize. Caution: The following discussion deals with landing in heavy seas. Use these procedures only in an emergency. Landing the float helicopter becomes risky when the height of short, choppy waves exceed one half the distance from the water to the helicopter’s stinger, and the distance from crest to crest is nearly equal to or less than the length of the helicopter. These waves cause the helicopter to pitch rapidly and may bring the rotor blades in contact with the tail boom or the tail rotor in contact with the water. In addition, avoid landing parallel to steep swells as this could lead to dynamic rollover. [Figure 9-5]
If landing on waves higher than half the distance from water to stinger, the following techniques apply:
|
| ©AvStop Online Magazine Contact Us Return To Books |