UNANTICIPATED
RIGHT YAW IN HELICOPTERS
| BACKGROUND.
Unanticipated right yaw, or loss of tail rotor effectiveness (LTE),
has been determined to be a contributing factor in a number of accidents
in various models of U.S. military helicopters. The National Transportation
Safety Board (NTSB) has identified LTE as a contributing factor in several
civil helicopter accidents wherein the pilot lost control. In most cases,
inappropriate or late corrective action may have resulted in the development
of uncontrollable yaw. These mishaps have occurred in the low-altitude,
low-airspeed flight regime while maneuvering, on final approach to a landing,
or during nap-of-the-earth tactical terrain flying. Typical civil |
|
operations include powerline patrol, electromagnetic survey, agricultural
spraying, livestock herding, police/radio traffic watch, emergency medical
service/rescue, and movie or television support flights.
THE PHENOMENA OF LTE.
a. LTE is a critical, low-speed aerodynamic flight characteristic which
can result in an uncommanded rapid yaw rate which does not subside of its
own accord and, if not corrected, can result in the loss of aircraft control.
b. LTE is not related to a maintenance malfunction and may occur in
varying degrees in all single main rotor helicopters at airspeeds less
than 30 knots. LTE is not necessarily the result of a control margin deficiency.
The anti-torque control margin established during Federal Aviation Administration
(FAA) testing is accurate and has been determined to adequately provide
for the approved sideward/ rearward flight velocities plus counteraction
of gusts of reasonable magnitudes. This testing is predicated on the assumption
that the pilot is knowledgeable of the critical wind azimuth for the helicopter
operated and maintains control of the helicopter by not allowing excessive
yaw rates to develop.
c. LTE has been identified as a contributing factor in several helicopter
accidents involving loss of control. Flight operations at low altitude
and low airspeed in which the pilot is distracted from the dynamic conditions
affecting control of the helicopter are particularly susceptible to this
phenomena. The following are three examples of this type of accident:
(1) A helicopter collided with the ground following a loss of control
during a landing approach. The pilot reported that he was on approach to
a ridge line landing zone when, at 70 feet above ground level (AGL) and
at an airspeed of 20 knots, a gust of wind induced loss of directional
control. The helicopter began to rotate rapidly to the right about the
mast. The pilot was unable to regain directional control before ground
contact.
(2) A helicopter impacted the top of Pike's Peak at 14,100 feet mean
sea level (MSL). The pilot said he had made a low pass over the summit
into a 40-knot headwind before losing tail rotor effectiveness. He then
lost directional control and struck the ground.
(3) A helicopter entered an uncommanded right turn and collided with
the ground. The pilot was maneuvering at approximately 300 feet AGL when
the aircraft entered an uncommanded right turn. Unable to regain control,
he closed the throttle and attempted an emergency landing into a city park.
UNDERSTANDING LTE PHENOMENA.
To understand LTE, the pilot must first understand the function of the
anti-torque system.
a. On U.S. manufactured single rotor helicopters, the main rotor rotates
counterclockwise as viewed from above. The torque produced by the main
rotor causes the fuselage of the aircraft to rotate in the opposite direction
(nose right). The anti-torque system provides thrust which counteracts
this torque and provides directional control while hovering.
b. On some European and Russian manufactured helicopters, the main rotor
rotates clockwise as viewed from above. In this case, the torque produced
by the main rotor causes the fuselage of the aircraft to rotate in the
opposite direction (nose left). The tail rotor thrust counteracts this
torque and provides directional control while hovering.
NOTE: This AC will focus on U.S. manufactured helicopters.
c. Tail rotor thrust is the result of the application of anti-torque
pedal by the pilot. If the tail rotor generates more thrust than is required
to counter the main rotor torque, the helicopter will yaw or turn to the
left about the vertical axis. If less tail rotor thrust is generated, the
helicopter will yaw or turn to the right. By varying the thrust generated
by the tail rotor, the pilot controls the heading when hovering.
d. In a no-wind condition, for a given main rotor torque setting, there
is an exact amount of tail rotor thrust required to prevent the helicopter
from yawing either left or right. This is known as tail rotor trim thrust.
In order to maintain a constant heading while hovering, the pilot should
maintain tail rotor thrust equal to trim thrust.
e. The environment in which helicopters fly, however, is not controlled.
Helicopters are subjected to constantly changing wind direction and velocity.
The required tail rotor thrust in actual flight is modified by the effects
of the wind. If an uncommanded right yaw occurs in flight, it may be because
the wind reduced the tail rotor effective thrust.
f. The wind can also add to the anti-torque system thrust. In this case,
the helicopter will react with an uncommanded. left yaw. The wind can and
will cause anti-torque system thrust variations to occur. Certain relative
wind directions are more likely to cause tail rotor thrust variations than
others. These relative wind directions or regions form an LTE conducive
environment.
CONDITIONS UNDER WHICH LTE MAY OCCUR.
a. Any maneuver which requires the pilot to operate in a high-power,
low-airspeed environment with a left crosswind or tailwind creates an environment
where unanticipated right yaw may occur.
b. There is greater susceptibility for LTE in right turns. This is especially
true during flight at low airspeed since the pilot may not be able to stop
rotation. The helicopter will attempt to yaw to the right. Correct and
timely pilot response to an uncommanded right yaw is critical. The yaw
is usually correctable if additional left pedal is applied immediately.
If the response is incorrect or slow, the yaw rate may rapidly increase
to a point where recovery is not possible.
c. Computer simulation has shown that if the pilot delays in reversing
the pedal control position when proceeding from a left crosswind situation
(where a lot of right pedal is required due to the sideslip) to downwind,
control would be lost, and the aircraft would rotate more than 360°
before stopping.
d. The pilot must anticipate these variations, concentrate on flying
the aircraft, and not allow a yaw rate to build. Caution should be exercised
when executing right turns under conditions conducive to LTE.
FLIGHT CHARACTERISTICS.
a. Extensive flight and wind tunnel tests have been conducted by aircraft
manufacturers. These tests have identified four relative wind azimuth regions
and resultant aircraft characteristics that can, either singularly or in
combination, create an LTE conducive environment capable of adversely affecting
aircraft controllability. One direct result of these tests is that flight
operations in the low speed flight regime dramatically increase the pilot's
workload.
b. Although specific wind azimuths are identified for each region, the
pilot should be aware that the azimuths shift depending on the ambient
conditions. The regions do overlap. The most pronounced thrust variations
occur in these overlapping areas.
c. These characteristics are present only at airspeeds less than 30
knots and apply to all single rotor helicopters. Flight test data has verified
that the tail rotor does not stall during this period.
d. The aircraft characteristics and relative wind azimuth regions are:
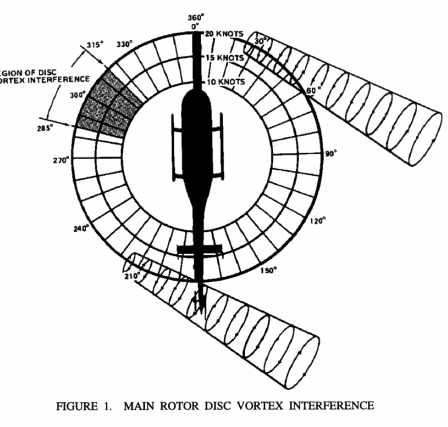
(1) Main rotor disc vortex interference (285° to 315°). (See
figure
1.)
(a) Winds at velocities of about 10 to 30 knots from the left front
will cause the main rotor vortex to be blown into the tail rotor by the
relative wind. The effect of this main rotor disc vortex is to cause the
tail rotor to operate in an extremely turbulent environment.
(b) During a right turn, the tail rotor will experience a reduction
of thrust as it comes into the area of the main rotor disc vortex. The
reduction in tail rotor thrust comes from the air flow changes experienced
at the tail rotor as the main rotor disc vortex moves across the tail rotor
disc. The effect of this main rotor disc vortex is to increase the angle
of attack of the tail rotor blades (increase thrust).
(c) The increase in the angle of attack requires the pilot to add right
pedal (reduce thrust) to maintain the same rate of turn.
(d) As the main rotor vortex passes the tail rotor, the tail rotor angle
of attack is reduced. The reduction in the angle of attack causes a reduction
in thrust and a right yaw acceleration begins. This acceleration can be
surprising, since the pilot was previously adding right pedal to maintain
the right turn rate.
(e) This thrust reduction will occur suddenly and, if uncorrected, will
develop into an uncontrollable rapid rotation about the mast. When operating
within this region, the pilot must be aware that the reduction in tail
rotor thrust can happen quite suddenly and the pilot must be prepared to
react quickly and counter that reduction with additional left pedal input.
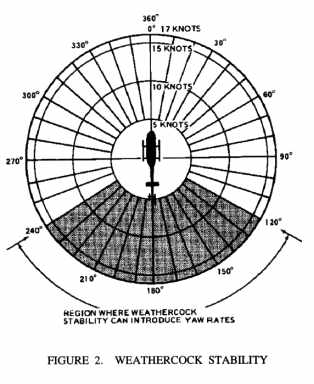
(2) Weathercock stability (120° to 240°). (See figure
2.)
(a) Tailwinds from 120° to 240°, like left crosswinds, will
cause a high pilot workload. The most significant characteristic of tailwinds
is that they are a yaw rate accelerator. Winds within this region will
attempt to weathervane the nose of the aircraft into the relative wind.
This characteristic comes from the fuselage and vertical fin.
(b) The helicopter will make a slow uncommanded turn either to the right
or left depending upon the exact wind direction unless a resisting pedal
input is made. If a yaw rate has been established in either direction,
it will be accelerated in the same direction when the relative winds enter
the 120° to 240° area unless corrective pedal action is made.
(c) If the pilot allows a right yaw rate to develop and the tail of
the helicopter moves into this region, the yaw rate can accelerate rapidly.
It is imperative that the pilot maintain positive control of the yaw rate
and devote full attention to flying the aircraft when operating in a downwind
condition.
(d) The helicopter can be operated safely in the above relative wind
regions if proper attention is given to maintaining control. If the pilot
is inattentive for some reason and a right yaw rate is initiated in one
of the above relative wind regions, the yaw rate may increase.
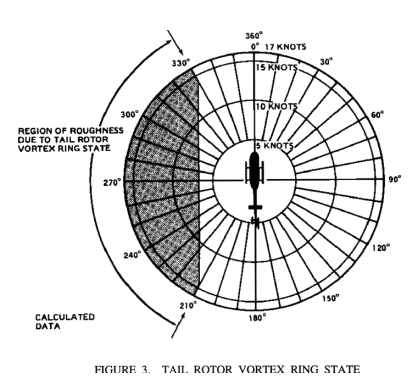
(3) Tail rotor vortex ring state (210° to 330°). (See figure
3.)
(a) Winds within this region will result in the development of the vortex
ring state of the tail rotor. As the inflow passes through the tail rotor,
it creates a tail rotor thrust to the left. A left crosswind will oppose
this tail rotor thrust. This causes the vortex ring state to form, which
causes a nonuniform, unsteady flow into the tail rotor. The vortex ring
state causes tail rotor thrust variations which result in yaw deviations.
The net effect of the unsteady flow is an oscillation of tail rotor thrust.
This is why rapid and continuous pedal movements are necessary when hovering
in left crosswind.
(b) In actuality, the pilot is attempting to compensate for the rapid
changes in tail rotor thrust. Maintaining a precise heading in this region
is difficult. LTE can occur when the pilot overcontrols the aircraft
(c) The resulting high pedal workload in the tail rotor vortex ring
state is well known and helicopters are operated routinely in this region.
This characteristic presents no significant problem unless corrective action
is delayed.
(d) When the thrust being generated is less than the thrust required,
the helicopter will yaw to the right. When hovering in left crosswinds,
the pilot must concentrate on smooth pedal coordination and not allow an
uncontrolled right yaw to develop.
(e) If a right yaw rate is allowed to build, the helicopter can rotate
into the wind azimuth region where weathercock stability will then accelerate
the right turn rate. Pilot workload during vortex ring state will be high.
A right yaw rate should not be allowed to increase.
(4) Loss of translational lift (all azimuths).
(a) The loss of translational lift results in increased power demand
and additional anti-torque requirements.
(b) This characteristic is most significant when operating at or near
maximum power and is associated with LTE for two reasons. First, if the
pilot's attention is diverted as a result of an increasing right yaw rate,
the pilot may not recognize that relative headwind is being lost and hence,
translational lift is reduced. Second, if the pilot does not maintain airspeed
while making a right downwind turn, the aircraft can experience an accelerated
right yaw rate as the power demand increases and the aircraft develops
a sink rate. Insufficient pilot attention to wind direction and velocity
can lead to an unexpected loss of translational lift. When operating at
or near maximum power, this increased power demand could result in a decrease
in rotor rpm.
(c) The pilot must continually consider aircraft heading, ground track,
and apparent ground speed, all of which contribute to wind drift and airspeed
sensations. Allowing the helicopter to drift over the ground with the wind
results in a loss of relative wind speed and a corresponding decrease in
the translational lift. Any reduction in the translational lift will result
in an increase in power demand and anti-torque requirements.
OTHER FACTORS.
The following factors can significantly influence the severity of the
onset of LTE.
a. Gross Weight and Density Altitude. An increase in either of these
factors will decrease the power margin between the maximum power available
and the power required to hover. The pilot should conduct low-level, low-airspeed
maneuvers with minimum weight.
b. Low Indicated Airspeed. At airspeeds below translational lift, the
tail rotor is required to produce nearly 100 percent of the directional
control. If the required amount of tail rotor thrust is not available for
any reason, the aircraft will yaw to the right.
c. Power Droop. A rapid power application may cause a transient power
droop to occur. Any decrease in main rotor rpm will cause a corresponding
decrease in tail rotor thrust. The pilot must anticipate this and apply
additional left pedal to counter the main rotor torque. All power demands
should be made as smoothly as possible to minimize the effect of the power
droop.
REDUCING THE ONSET OF LTE.
In order to reduce the onset of LTE, the pilot should:
a. Ensure that the tail rotor is rigged in accordance with the maintenance
manual.
b. Maintain maximum power-on rotor rpm. If the main rotor rpm is allowed
to decrease, the antitorque thrust available is decreased proportionally.
c. When maneuvering between hover and 30 knots:
(1) Avoid tailwinds. If loss of translational lift occurs, it will result
in an increased high power demand and an additional anti-torque requirement.
(2) Avoid out of ground effect (OGE) hover and high power demand situations,
such as lowspeed downwind turns.
(3) Be especially aware of wind direction and velocity when hovering
in winds of about 8-12 knots (especially OGE). There are no strong indicators
to the pilot of a reduction of translational lift. A loss of translational
lift results in an unexpected high power demand and an increased anti-torque
requirement.
(4) Be aware that if a considerable amount of left pedal is being maintained,
a sufficient amount of left pedal may not be available to counteract an
unanticipated right yaw.
(5) Be alert to changing aircraft flight and wind conditions which may
be experienced when flying along ridge lines and around buildings.
(6) Stay vigilant to power and wind conditions.
RECOMMENDED RECOVERY TECHNIQUES.
a. If a sudden unanticipated right yaw occurs, the pilot should perform
the following:
(1) Apply full left pedal. Simultaneously, move cyclic forward to increase
speed. If altitude permits, reduce power.
(2) As recovery is effected, adjust controls for normal forward flight.
b. Collective pitch reduction will aid in arresting the yaw rate but
may cause an increase in the rate of descent. Any large, rapid increase
in collective to prevent ground or obstacle contact may further increase
the yaw rate and decrease rotor rpm.
c. The amount of collective reduction should be based on the height
above obstructions or surface, gross weight of the aircraft, and the existing
atmospheric conditions.
d. If the rotation cannot be stopped and ground contact is imminent,
an autorotation may be the best course of action. The pilot should maintain
full left pedal until rotation stops, then adjust to maintain heading.
SUMMARY.
a. The various wind directions can cause significantly differing rates
of turn for a given pedal position. The most important principle for the
pilot to remember is that the tail rotor is not stalled. The corrective
action is to apply pedal opposite to the direction of the turn.
b. Avoiding LTE may best be accomplished by pilots being knowledgable
and avoiding conditions which are conducive to LTE. Appropriate and timely
response is essential and critical.
c. By maintaining an acute awareness of wind and its effect upon the
aircraft, the pilot can significantly reduce LTE exposure.

{kind=link}
{kind=link}
{kind=link}