|
|
| INSTRUMENT PROCEDURES HANDBOOK |
|
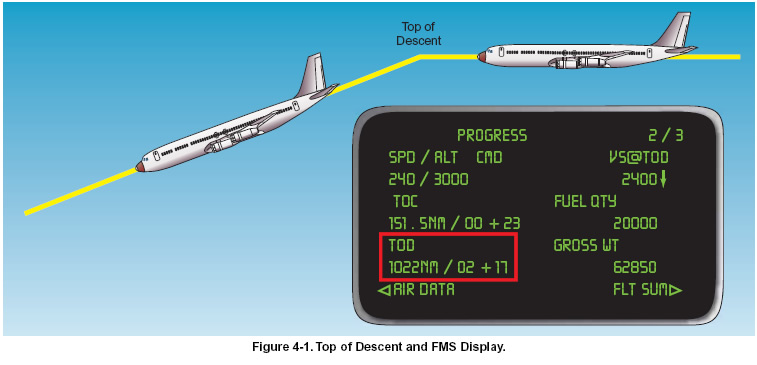
CHAPTER 4 ARRIVALS Preparation for the arrival and approach begins long before the descent from the en route phase of flight. Planning early, while there are fewer demands on your attention, leaves you free to concentrate on precise control of the aircraft and better equipped to deal with problems that might arise during the last segment of the flight. TRANSITION FROM EN ROUTE This chapter focuses on the current procedures pilots and air traffic control (ATC) use for instrument flight rule (IFR) arrivals in the National Airspace System (NAS). The objective is to provide pilots with an understanding of ATC arrival procedures and pilot responsibilities as they relate to the transition between the en route and approach phases of flight. This chapter emphasizes standard terminal arrival routes (STARs), descent clearances, descent planning, and ATC procedures, while the scope of coverage focuses on transitioning from the en route phase of flight, typically the origination point of a STAR to the STAR termination fix. This chapter also differentiates between area navigation (RNAV) STARs and STARs based on conventional navigational aids (NAVAIDs). Optimum IFR arrival options include flying directly from the en route structure to an approach gate or initial approach fix (IAF), a visual arrival, STARs, and radar vectors. Within controlled airspace, ATC routinely uses radar vectors for separation purposes, noise abatement considerations, when it is an operational advantage, or when requested by pilots. Vectors outside of controlled airspace are provided only on pilot request. The controller tells you the purpose of the vector when the vector is controller-initiated and takes the aircraft off a previously assigned nonradar route. Typically, when operating on RNAV routes, you are allowed to remain on your own navigation. TOP OF DESCENT Planning the descent from cruise is important because of the need to dissipate altitude and airspeed in order to arrive at the approach gate properly configured. Descending early results in more flight at low altitudes with increased fuel consumption, and starting down late results in problems controlling both airspeed and descent rates on the approach. Top of descent (TOD) from the en route phase of flight for high performance airplanes is often used in this process and is calculated manually or automatically through a flight management system (FMS) [Figure 4-1], based upon the altitude of the approach gate. The approach gate is an imaginary point used by ATC to vector aircraft to the final approach course. The approach gate is established along the final approach course 1 nautical mile (NM) from the final approach fix (FAF) on the side away from the airport and is located no closer than 5 NM from the landing threshold. The altitude of the approach gate or initial approach fix is subtracted from the cruise altitude, and then the target rate of descent and groundspeed is applied, resulting in a time and distance for TOD, as depicted in Figure 4-1 on page 4-1.
Achieving an optimum stabilized, constant rate descent during the arrival phase requires different procedures for turbine-powered and reciprocating-engine airplanes. Controlling the airspeed and rate of descent is important for a stabilized arrival and approach, and it also results in minimum time and fuel consumption. Reciprocating-engine airplanes require engine performance and temperature management for maximum engine longevity, especially for turbocharged engines. Pilots of turbine-powered airplanes must not exceed the airplane’s maximum operating limit speed above 10,000 feet, or exceed the 250-knot limit below 10,000 feet. Also, consideration must be given to turbulence that may be encountered at lower altitudes that may necessitate slowing to the turbulence penetration speed. If necessary, speed brakes should be used.
|